|
 Webots 6 Webots 6
Simulation Software
Webots allows a user to model any mobile robot with accurate
simulation. User models included (Harmonic Arm 6M, e-puck, AIBO robot, humanoid robot,
Blimp flying robot, soccer robot, LEGO Mindstorms robot, Hemisson robot,
etc.) or create his/her own model by shaping a robot and setting sensors
and actuators.
|
Features
- Models and
simulates any mobile robot, including wheeled, legged and flying
robots.
- Includes a
complete library of sensors and actuators.
- A number of
sensors can be plugged into your robot model and tuned individually
(range, noise, response, field of view, etc.). Similarly, a number
of actuators can be plugged into your robot model, and even be
combined hierarchically.
- Accurate
simulation system
- The
simulation system used in Webots uses virtual time, making it
possible to run simulations much faster than it would take on a
real robot. Depending on the complexity of the setup and the power
of your computer, simulations can run up to 300 times faster than
on the real robot when using the fast simulation mode.
- Lets you program
the robots in C, C++ and Java, or from third party software through
TCP/IP.
- Transfers
controllers to real mobile robots, including e-puck, AIBO, LEGO
Mindstorms, Khepera, Koala, and Hemisson.
- Realistic
Physics Simulation
- Simulating
complex robotic devices including articulated mechanical parts
requires precise physics simulation. Webots relies on ODE (Open
Dynamics Engine) to perform accurate physics simulation wherever it
is necessary.
- Interactivity
- The graphical
user interface of Webots allows you to easily interact with the
simulation while it is running.
- Creates AVI or
MPEG simulation movies for web and public presentations.
- Includes many
examples with controller source code and models of commercially
available robots.
- Discount
available when purchased with e-puck robot.
|
|

|
|
|
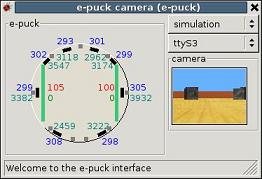
The
e-puck window controls both the simulated and real
e-puck robot.
|
Model
of Koala mobile robot with two motors, wheels, and 16 infrared sensors.
|
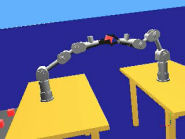
Simulation
of
Harmonic Arms
Video(WMV - 2.4 MB)
|
Improvements
from WEBOTS 5 to WEBOTS 6
- Java API
- Python and C++
API
Platform and System
Requirements
|
o
Windows 7 Vista or XP
o
Mac OS X 10.5 or newer
o
Linux glibc 2.3 or newer
o
1 GHz processor
o
512 MB RAM / 300 MB disk space
o
NVIDIA or ATI graphics card with 128MB RAM
|
Humanoid robot
|
|
©
2008, AAI Canada, Inc.
112 John Cavanaugh Drive, Ottawa,
Ontario, Canada K0A 1L0
TEL: +1.613.839.6161 or 1.800.895.1122 ; FAX: +1.613.836.5567
AAI Canada, Inc. provides this information as an informational tool to the
public,
and is not responsible for any errors in content. All information should be
verified by the reader.
General Inquiries: Contact Us
Technical Inquiries: Webmaster
|
